Безпілотна гусенична транспортна система для підземних шахт

Системні функції
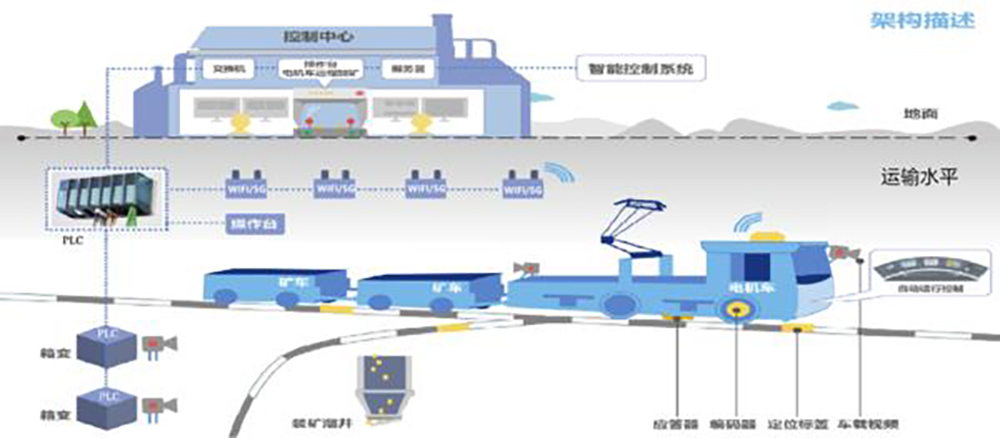
Система безводійного електровоза складається з системи автоматичного керування (ATO), блоку керування PLC, блоку точного позиціонування, інтелектуального блоку дозування, блоку бездротової мережі зв’язку, блоку централізованого керування закриттям сигналу перемикання, відеомоніторингу та відео AI систему та центр управління.
Короткий опис функції
Повністю автоматична крейсерська робота:відповідно до теорії крейсерської швидкості з фіксованою швидкістю, відповідно до фактичної ситуації та вимог у кожній точці транспортного рівня, крейсерська модель транспортного засобу будується для реалізації автономного регулювання швидкості руху локомотива.
Система точного позиціонування:точне позиціонування локомотива досягається за допомогою технології зв'язку та технології розпізнавання маяків тощо, з автоматичним підйомом носової частини та автономним регулюванням швидкості.
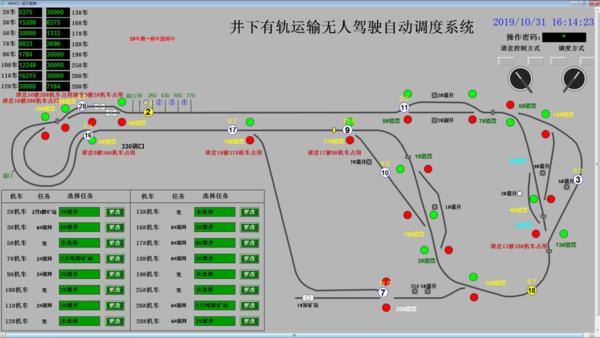
Інтелектуальна диспетчеризація:Завдяки збору даних, таких як рівень матеріалу та клас кожного жолоба, а потім відповідно до положення в реальному часі та робочого стану кожного локомотива, локомотив автоматично призначається для роботи.
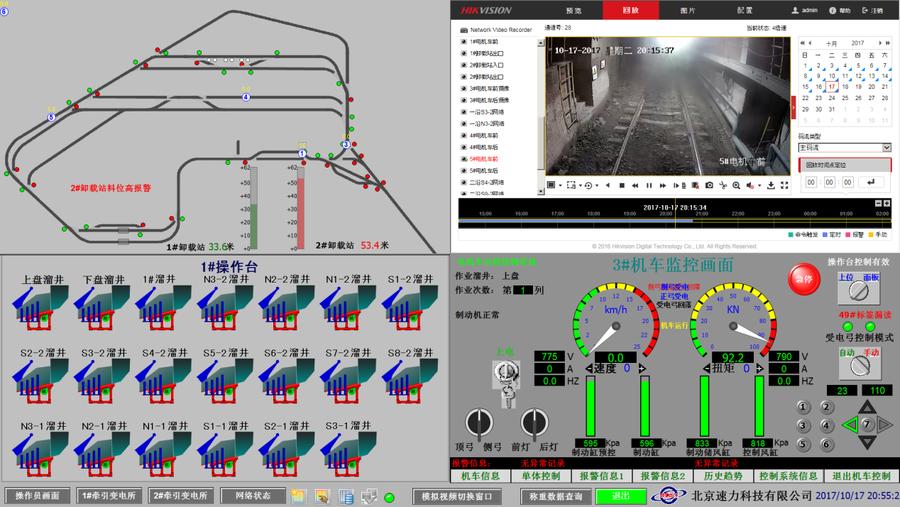
Віддалене ручне завантаження:Дистанційне ручне завантаження може бути досягнуто на поверхні, керуючи завантажувальним обладнанням.(Додаткова повністю автоматична система завантаження)
Виявлення перешкод і захист безпеки:Додавши перед транспортним засобом високоточний радіолокаційний пристрій для досягнення виявлення людей, транспортних засобів і падаючого каміння перед транспортним засобом, щоб забезпечити безпечну відстань транспортного засобу, транспортний засіб автономно виконує низку операцій, таких як озвучування клаксон і гальмування.
Функція статистики виробництва:Система автоматично виконує статистичний аналіз параметрів руху локомотива, траєкторій руху, журналів команд і завершення виробництва для формування звітів про роботу виробництва.
Основні моменти системи.
Автоматизована робота систем метрополітену.
Піонерський новий режим роботи для безводійного підземного елективного локомотива.
Реалізація мережевого, цифрового та візуального керування системами метрополітену.

Аналіз ефективності системи
Під землею без нагляду, оптимізуючи схеми виробництва.
Раціоналізація чисельності працюючих і зниження витрат на оплату праці.
Поліпшення робочого середовища та підвищення внутрішньої безпеки.
Інтелектуальні операційні механізми для управління змінами.
Економічні вигоди.
-Ефективність:підвищення продуктивності з одним локомотивом.
Стабільне виробництво завдяки розумному розподілу руди.
-Персонал:машиніст локомотива і оператор мінного випуску в одному.
Один працівник може керувати кількома локомотивами.
Скорочення чисельності особового складу на посадах в пункті розвантаження шахти.
-Обладнання:зниження вартості втручання людини в роботу обладнання.
Переваги управління.
Аналіз даних обладнання для забезпечення попереднього обслуговування обладнання та зниження витрат на управління обладнанням.
Удосконалити виробничі моделі, оптимізувати персонал і скоротити витрати на управління персоналом.





